
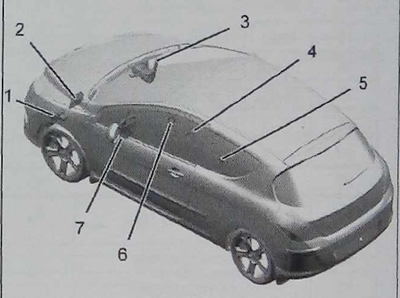
Расположение ЭБУ сети CAN IS
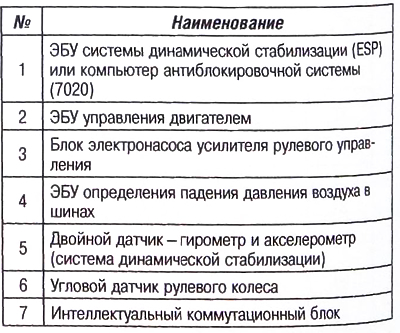
Сеть CAN IS соединяет блоки управления, связанные с движением автомобиля, например, тормозной системы!, коробки передач или двигателя .
Скорость передачи данных 500 Кбит/сек (High Speed).
Сеть CAN IS является сетью многих блоков, где каждый из них постоянно передает информацию для всех остальных блоков.
Каждый ЭБУ обрабатывает свою информацию.
Передача сообщений по сети происходит периодически, кроме сообщений, носящих случайный характер. Сеть CAN IS имеет устройство, позволяющее устанавливать связь при включении в нее, по крайней мере, двух блоков управления.
ЭБУ управления двигателем (1320) и коммутационным блоком (BSI 1) являются единственными компьютерами, имеющими оконечное сопротивление.
Чтобы обеспечить связь по сети, ЭБУ управления двигателем (1320) и коммутационный блок (BSI 1) должны всегда быть в сети.
Особенности сети CAN IS:
- некоторые блоки управления соединены в линию, активизирующуюся по команде с дистанционного пульта (RDC), что позволяет предварительно «разбудить» блоки управления;
- линия диагностики К.
Примечание. Разрыв провода CAN High или CAN Low делает невозможной коммуникацию в сети.
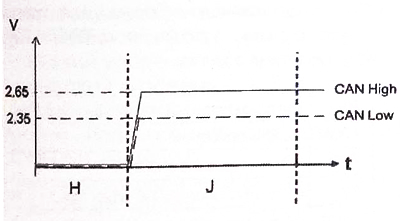
Обозначения:
- «Н» — сеть CAN в дежурном режиме;
- «J» — сеть CAN в рабочем режиме;
- «V» — вольт;
- « Т» — время.
Межсистемная сеть CAN характеризуется двумя средними значениями напряжения в рабочем режиме:
- Can High — 2,65 В;
- CAN Low — 2,35 В.
Сеть CAN находится в рабочем режиме при CAN IS High + CAN IS Low = 5B.
Примечание. Представленные значения напряжения являются средними значениями.
Номинальные кривые сети CAN (показания осциллографа)
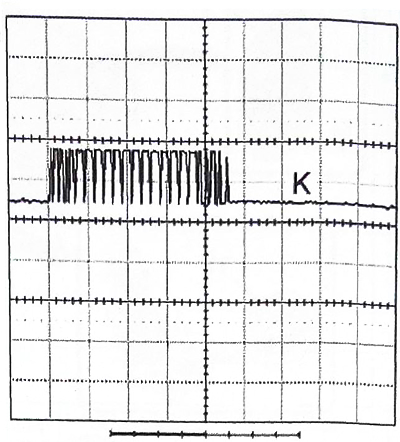 | 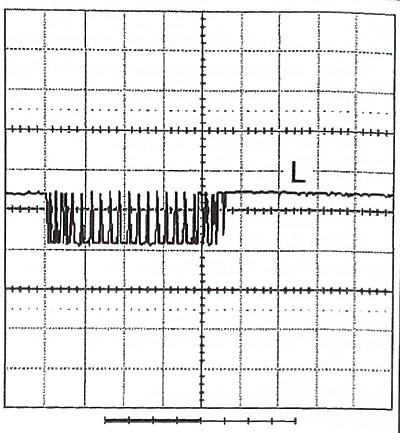 |
- «К»: CAN High;
- «L»: CAN IS Low.
Напряжение: 1 В.
Время: 100 м/с.
Условия проведения тестов:
- двигатель не работает;
- зажигание включено.
Результаты: наблюдать постоянную составляющую на уровне примерно 2,5 вольт и серию переменных импульсов с амплитудой 1 В, представляющие информацию, передаваемую по сети CAN.
Сигнал CAN Low имеет обратную направленность по сравнению с сигналом CAN High.