
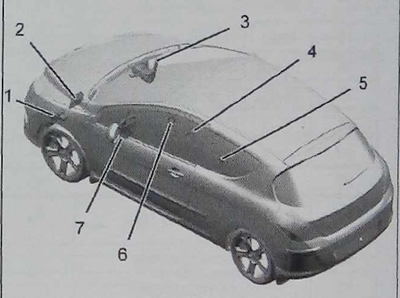
Položaj CAN IS ECU
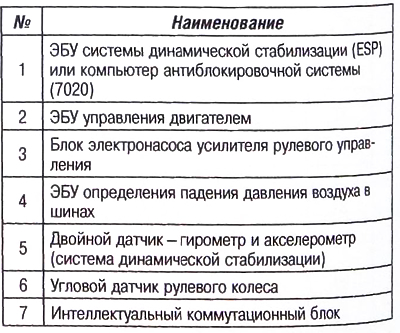
CAN IS mreža povezuje upravljačke jedinice povezane s kretanjem vozila, poput kočionog sustava!, mjenjača ili motora.
Brzina prijenosa podataka 500 Kbps (High Speed).
CAN IS mreža je mreža od mnogo blokova, gdje svaki od njih konstantno prenosi informacije za sve ostale blokove.
Svaki ECU obrađuje vlastite podatke.
Prijenos poruka preko mreže događa se povremeno, osim poruka koje su nasumične prirode. CAN IS mreža ima uređaj koji omogućuje komunikaciju kada su u nju uključene najmanje dvije upravljačke jedinice.
ECU za kontrolu motora (1320) i sklopnu jedinicu (BSI 1) su jedina računala koja imaju završni otpor.
Da biste omogućili mrežnu komunikaciju, ECU za upravljanje motorom (1320) i sklopnu jedinicu (BSI 1) treba uvijek biti online.
Značajke CAN IS mreže:
- neke upravljačke jedinice povezane su u liniju koja se aktivira naredbom s daljinskog upravljača (RDC), koji omogućuje preliminarni «probuditi» upravljačke jedinice;
- dijagnostička linija K.
Bilješka. Prekid CAN High ili CAN Low žice onemogućuje mrežnu komunikaciju.
Oznake:
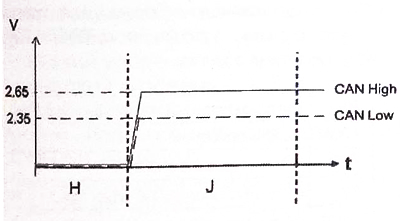
- «H» — CAN·mreža u stanju pripravnosti;
- «J» — CAN·mreža u načinu rada;
- «V» - volt;
- «T» - vrijeme.
CAN interkonekcijsku mrežu karakteriziraju dva prosječna radna napona:
- Can High - 2.65V;
- CAN Low - 2,35 V.
CAN·mreža radi na CAN IS High + CAN IS Low = 5V.
Bilješka. Prikazane vrijednosti napona su prosječne vrijednosti.
Nazivne krivulje za CAN·mrežu (očitanja osciloskopa)
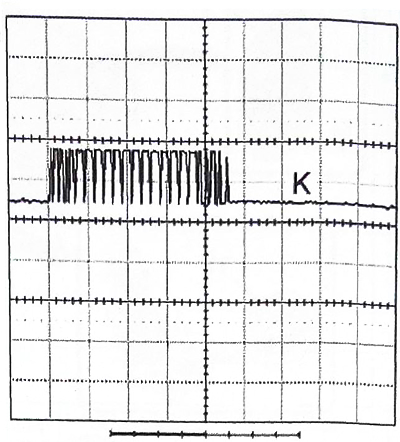 | 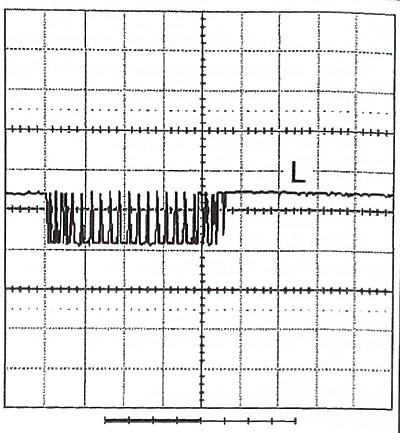 |
- «DO»: CAN High;
- «L»: CAN IS Low.
Napon: 1 V.
Vrijeme: 100 m/s.
Uvjeti ispitivanja:
- motor ne radi;
- paljenje je uključeno.
Rezultati: promatrajte istosmjernu komponentu od oko 2,5 volta i niz izmjeničnih impulsa s amplitudom od 1 V, koji predstavljaju informaciju koja se prenosi preko CAN·mreže.
CAN Low signal je obrnut od CAN High signala.