
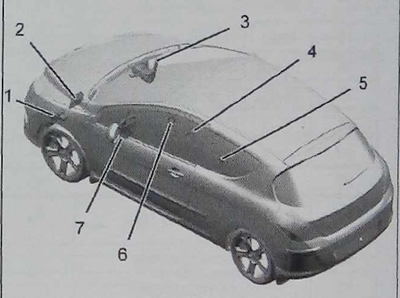
A CAN IS ECU helye
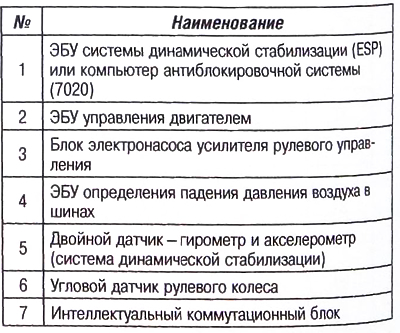
A CAN IS hálózat a jármű mozgásával kapcsolatos vezérlőegységeket köt össze, mint például a fékrendszer!, sebességváltó vagy a motor.
Adatátviteli sebesség 500 Kbps (High Speed).
A CAN IS hálózat sok blokkból álló hálózat, ahol mindegyik folyamatosan információt továbbít az összes többi blokk számára.
Mindegyik ECU a saját információit dolgozza fel.
Az üzenetek hálózaton keresztüli továbbítása időszakosan történik, kivéve a véletlenszerű üzeneteket. A CAN IS hálózat rendelkezik egy olyan eszközzel, amely lehetővé teszi a kommunikációt, ha legalább két vezérlőegységet tartalmaz.
Motorvezérlő ECU (1320) és kapcsolóegység (BSI 1) ezek az egyetlen számítógépek, amelyek lezáró ellenállással rendelkeznek.
A hálózati kommunikáció engedélyezéséhez a motorvezérlő ECU (1320) és kapcsolóegység (BSI 1) mindig online kell lennie.
A CAN IS hálózat jellemzői:
- egyes vezérlőegységek egy vonalba vannak csatlakoztatva, amelyet egy távirányító parancsa aktivál (RDC), amely lehetővé teszi az előzetes «felébredni» vezérlőegységek;
- K diagnosztikai vonal.
Jegyzet. A CAN High vagy CAN Low vezeték szakadása lehetetlenné teszi a hálózati kommunikációt.
Megnevezések:
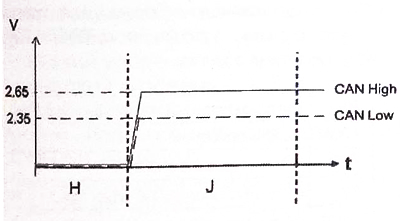
- «H» — CAN hálózat készenléti állapotban;
- «J» — CAN hálózat működési módban;
- «V» - volt;
- «T» - idő.
A CAN összekötő hálózatot két átlagos üzemi feszültség jellemzi:
- Can High - 2,65 V;
- CAN alacsony - 2,35 V.
A CAN hálózat CAN IS High + CAN IS Low = 5 V mellett működik.
Jegyzet. A megjelenített feszültségértékek átlagos értékek.
CAN hálózat névleges görbéi (oszcilloszkóp leolvasások)
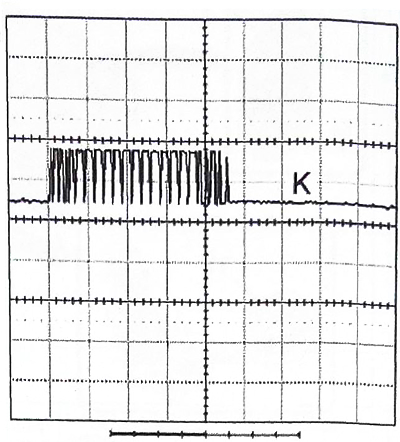 | 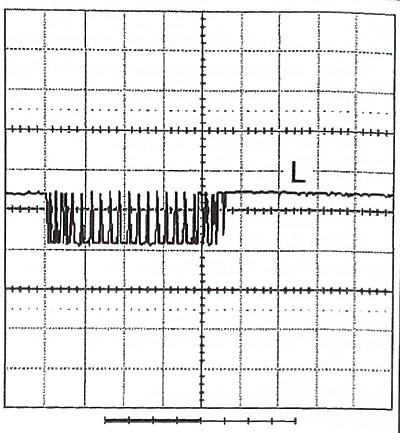 |
- «NAK NEK»: CAN High;
- «L»: CAN IS Low.
Feszültség: 1V.
Idő: 100 m/s.
Teszt feltételek:
- a motor nem jár;
- a gyújtás be van kapcsolva.
Eredmények: figyeljen meg egy körülbelül 2,5 voltos egyenáramú komponenst és egy 1 V amplitúdójú váltakozó impulzussorozatot, amely a CAN hálózaton keresztül továbbított információt képvisel.
A CAN Low jel megfordul a CAN High jeltől.