
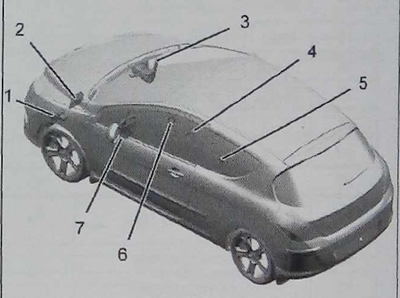
Lokalizacja CAN IS ECU
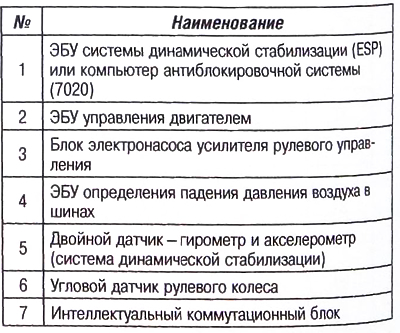
Sieć CAN IS łączy jednostki sterujące związane z ruchem pojazdu, takie jak układ hamulcowy!, skrzynia biegów czy silnik.
Szybkość transmisji danych 500 Kb/s (High Speed).
Sieć CAN IS jest siecią wielu bloków, z których każdy stale przesyła informacje dla wszystkich pozostałych bloków.
Każdy ECU przetwarza własne informacje.
Transmisja komunikatów w sieci odbywa się okresowo, z wyjątkiem komunikatów o charakterze losowym. Sieć CAN IS posiada urządzenie, które umożliwia komunikację, gdy zawarte są w niej co najmniej dwie jednostki sterujące.
ECU sterowania silnikiem (1320) i jednostka przełączająca (BSI 1) są jedynymi komputerami, które mają rezystancję końcową.
Aby umożliwić komunikację sieciową, ECU sterowania silnikiem (1320) i jednostka przełączająca (BSI 1) powinien być zawsze online.
Cechy sieci CAN IS:
- niektóre jednostki sterujące są połączone w linię, która jest aktywowana poleceniem z pilota (RDC), co pozwala wstępnie «budzić» jednostki sterujące;
- linia diagnostyczna K.
Notatka. Przerwa w przewodzie CAN High lub CAN Low uniemożliwia komunikację sieciową.
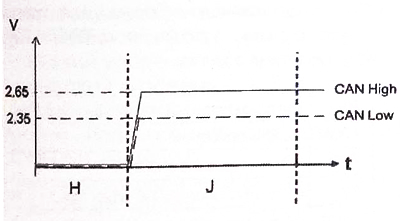
Oznaczenia:
- «H» — sieć CAN w trybie czuwania;
- «J» — Sieć CAN w trybie operacyjnym;
- «V» - wolt;
- «T» - czas.
Sieć połączeń CAN charakteryzuje się dwoma średnimi napięciami roboczymi:
- Może wysokie - 2,65 V;
- CAN niski - 2,35 V.
Sieć CAN działa przy napięciu CAN IS High + CAN IS Low = 5 V.
Notatka. Podane wartości napięcia są wartościami średnimi.
Krzywe nominalne dla sieci CAN (odczyty z oscyloskopu)
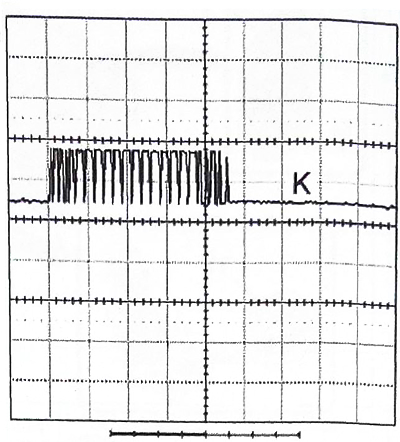 | 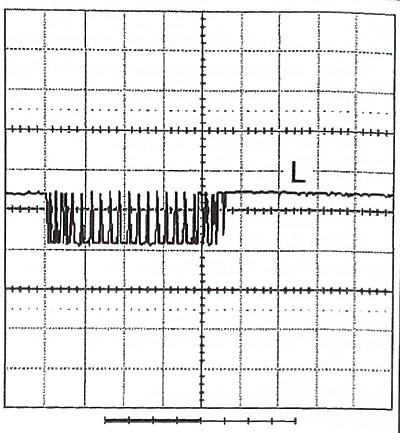 |
- «DO»: CAN High;
- «L»: CAN IS Low.
Napięcie: 1 V.
Czas: 100 m/s.
Test kondycji:
- silnik nie pracuje;
- zapłon jest włączony.
Wyniki: zaobserwować składową prądu stałego o wartości około 2,5 wolta i serię naprzemiennych impulsów o amplitudzie 1 V, reprezentujących informacje przesyłane przez sieć CAN.
Sygnał CAN Low jest odwrócony od sygnału CAN High.