
ЭП включает совокупность взаимосвязанных и взаимодействующих друг с другом механических, электромеханических, электротехнических и электронных элементов и устройств. ЭП состоит из силовой части, включающей электродвигатель и устройство для передачи механической энергии исполнительному механизму, и системы управления, содержащей устройства для формирования требуемых свойств ЭП и средства защиты от возникновения внештатных ситуаций.
Структурная схема ЭП приведена на рис. 1. Утолщенными линиями на схеме показаны силовые потоки энергии, а тонкими линиями — маломощные управляющие и информационные цепи.
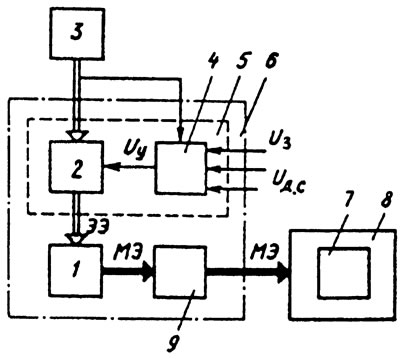
Рис. 1. Структурная схема ЭП автомобиля
Электромеханическим преобразователем электрической энергии, потребляемой от источника тока 3, в механическую энергию является электродвигатель 1. В некоторых режимах работы ЭП (динамическое торможение, рекуперация), электродвигатель осуществляет и обратное преобразование энергии, получая механическую энергию от исполнительного механизма.
От электродвигателя механическая энергия через механический, гидравлический или электромагнитный передаточный механизм 9 подается на рабочий орган 7 исполнительного механизма 8. Передаточный механизм обеспечивает согласование параметров движения электродвигателя и исполнительного механизма.
Большое значение при проектировании ЭП имеет правильный выбор способа соединения приводного электродвигателя с исполнительным механизмом соответствующего функционального устройства. Непосредственное их соединение без передаточного механизма обычно не возможно, так как вал электродвигателя, как правило, имеет значительно большие частоты вращения, чем валы исполнительных механизмов. В ЭП, где вращательное движение вала электродвигателя преобразуется в поступательное движение рабочего органа, необходимы передаточные механизмы.
Быстроходные электродвигатели имеют меньшие габаритные размеры, массу и стоимость, чем тихоходные. Однако их использование в ЭП с исполнительными механизмами при низких скоростях перемещения рабочих органов способствует тому, что передаточный механизм становится сложнее и наиболее дорогостоящим, потери в нем увеличиваются, а КПД ЭП существенно снижается. С другой стороны менее выгодной может оказаться упрощенная кинематическая схема передаточного механизма тихоходного электродвигателя. Выбор того или иного варианта ЭП производится на основании сопоставления возможных комбинаций соединения электродвигателя и исполнительного механизма.
Для получения энергии с требуемыми для электродвигателя 1 параметрами и управления потоком этой энергии в электрическую цепь между электродвигателем и источником электроэнергии включается силовой преобразователь 2. В ЭП применяются различные типы силовых преобразователей: управляемые и неуправляемые выпрямители, инверторы, импульсные преобразователи напряжения постоянного тока с различным видом модуляции выходного напряжения постоянного тока, в которых в основном используются полупроводниковые элементы (диоды, транзисторы, тиристоры и другие электронные приборы).
Управление электроприводом и автоматизацию его работы обеспечивает блок управления 4. Блок управления вырабатывает выходной сигнал управления (7у, который подается в силовой преобразователь, в соответствии с входным сигналом (13, задающим характер движения рабочего органа исполнительного механизма, и рядом других сигналов (7Д с, дающих информацию о реализации функций исполнительного механизма, характере его движения, работе отдельных узлов ЭП, возникновении аварийных ситуаций и т.д. Блок управления 4 вместе с силовым преобразователем 2 образуют систему управления 5 ЭП 6.
ЭП классифицируют по характеру движения, типу и принципу работы силового преобразователя, числу используемых электродвигателей, виду источника электроэнергии, способу управления, наличию или отсутствию механической передачи и т.д.
По характеру движения различают ЭП вращательного, колебательного и поступательного движения, при этом частота вращения вала электродвигателя может быть регулируемой и нерегулируемой, а само движение — непрерывным или дискретным, однонаправленным или двунаправленным (реверсивным).
По числу используемых электродвигателей различают групповые, индивидуальные (одиночные) и взаимосвязанные (многодвигательные) ЭП. Групповые ЭП характеризуются тем, что один его электродвигатель приводит в движение несколько исполнительных механизмов одного устройства или один исполнительный механизм нескольких устройств. Индивидуальный ЭП обеспечивает движение одного рабочего органа исполнительного механизма. Взаимосвязанный ЭП представляет собой два или несколько электрически и механически связанных между собой индивидуальных ЭП, работающих совместно на один или несколько исполнительных механизмов. При этом, если электродвигатели связаны между собой механически и работают на общий вал, то такой ЭП называется многодвигательным. В многодвигательном ЭП не только каждый исполнительный механизм приводится в движение отдельным электродвигателем, но даже элементы одного исполнительного механизма снабжаются индивидуальными электродвигателями.
В ряде случаев электродвигатель крепится к исполнительному механизму с помощью фланца или встраивается внутрь корпуса функционального устройства. Прогрессивным направлением развития конструкции ЭП, позволяющим повысить их технико-экономические показатели, является объединение в одном устройстве электродвигателя, передаточного механизма, исполнительного механизма и элементов системы управления.
В зависимости от назначения и условий применения электродвигатели в ЭП могут работать в продолжительном, кратковременном и повторно-кратковременном режимах. Для продолжительного режима характерна такая длительность работы, при которой температура электродвигателя достигает установившегося значения. За относительно малый период работы в кратковременном режиме температура электродвигателя не успевает достигнуть установившегося значения. Перерыв в работе исполнительного механизма достаточен для того, чтобы температура двигателя снизилась до температуры окружающей среды. Повторно-кратковременный режим характеризуется рабочим периодом, который чередуется с паузами (остановка или работа в режиме холостого хода), причем ни в один из периодов работы температура электродвигателя не достигает установившегося значения, а во время снятия нагрузки электродвигатель не успевает охладиться до температуры окружающей среды.
Важным показателем повторно-кратковременного режима является отношение времени рабочей части каждого цикла ко всему периоду времени цикла. Этот показатель называется относительной продолжительностью работы ПР или относительной продолжительностью включения ПВ.
Выбор конструктивного исполнения электродвигателя для ЭП производится с учетом отведенного для его размещения пространства, а также условий окружающей среды с целью защиты его от воздействия пыли, влаги, вредных газов, паров топлива, масла, высокой температуры и т.д. При выборе типа электродвигателя для ЭП необходимо учитывать особенности механических характеристик как исполнительного механизма, так и электродвигателя.
Момент Мс сопротивления движению исполнительного механизма зависит исключительно от механических свойств механизма и может быть постоянным, не зависимым от частоты вращения п рабочего органа (или скорости перемещения). Зависимость частоты вращения рабочего органа от момента сопротивления движению называется механической характеристикой исполнительного механизма f=n(Mс).
Вращающий момент электродвигателя, создаваемый взаимодействием магнитного потока возбуждения и силы тока в обмотке якоря, как правило зависит от частоты его вращения. Поскольку от частоты вращения якоря зависит ЭДС, индуктируемая в обмотке, и, следовательно, сила тока, потребляемого электродвигателем. Электродвигатель имеет свою, не зависимую от характеристик исполнительного механизма, механическую характеристику.
Вращающий момент электродвигателя М, определяемый электромагнитными процессами в нем, всегда уравновешивается моментом сопротивления, приложенным к валу электродвигателя со стороны исполнительного механизма. При установившейся частоте вращения вала электродвигателя — это статический момент сопротивления Mс, который складывается из момента, создаваемого полезной нагрузкой и суммарных потерь в исполнительном механизме. При изменении частоты вращения вала nв электродвигателя к моменту Мс добавляется динамическая составляющая, обусловленная изменением кинетической энергии движущихся частей ЭП. Очевидно, что частота вращения вала электродвигателя и скорость перемещения исполнительного механизма установятся такими, при которых моменты на обеих механических характеристиках будут равны.
Частота вращения вала большинства электродвигателей в большей или меньшей степени снижается с увеличением вращающего момента. В зависимости от степени изменения величины пв вращения при различном вращающем моменте механическая характеристика считается более жесткой или более мягкой.
Особенность жесткой механической характеристики — незначительное изменение величины nв при различном вращающем моменте в пределах рабочей части характеристик.
Мягкие механические характеристики электродвигателя отличаются значительным изменением величины nв в зависимости от вращающего момента.
Различают естественную и искусственные характеристики электродвигателей.
Естественная характеристика электродвигателя соответствует основной паспортной схеме его включения и номинальным параметрам напряжения электроснабжения. На естественной характеристике располагается точка номинального режима работы электродвигателя. Естественная механическая характеристика электродвигателя - это лишь одна частная характеристика из бесчисленного множества искусственных характеристик, которые электродвигатель может иметь в статических и динамических режимах работы.
Искусственными характеристиками называются механические характеристики электродвигателя при наличии внешнего сопротивления в цепи якоря при ослабленном магнитном потоке или при изменении подводимого к выводам электродвигателя напряжении. Поскольку эти характеристики получают с целью регулирования силы тока, вращающего момента и частоты вращения вала электродвигателя, то их также называют регулировочными.
Для многих исполнительных механизмов требуется регулирование частоты вращения рабочего органа (или скорости перемещения при поступательном движении рабочего органа). В ЭП регулирование частоты вращения вала электродвигателя обеспечивается в соответствии с задающим сигналом или по заранее заданной программе. Регулировать скорость вращательного или поступательного движения исполнительного механизма можно воздействием на электродвигатель, механическую передачу или на обе составляющие части ЭП одновременно.
Так называемый электрический способ регулирования скорости перемещения рабочего органа исполнительного механизма предусматривает воздействие на электродвигатель при неизмененных параметрах механической передачи. Этот способ получил наибольшее распространение в ЭП благодаря большим регулировочным возможностям, простоте и удобству использования в общей схеме управления ЭП и экономичности. Таким образом, управление движением рабочих органов исполнительных механизмов в большинстве случаев достигается за счет целенаправленного воздействия на электродвигатель при помощи его системы управления с целью получения соответствующих искусственных характеристик.
На рис. 2 приведены естественная механическая характеристика (прямая 1) электродвигателя с возбуждением от постоянных магнитов (с независимым электромагнитным возбуждением) и две искусственные: при введении в цепь якоря добавочного резистора (прямая 2) и уменьшении подводимого к якорю напряжения (прямая 3). Переход на обе искусственные характеристики при моменте нагрузки Мс обеспечивает снижение угловой скорости со вала электродвигателя с электромагнитным возбуждением до требуемого уровня ωн.
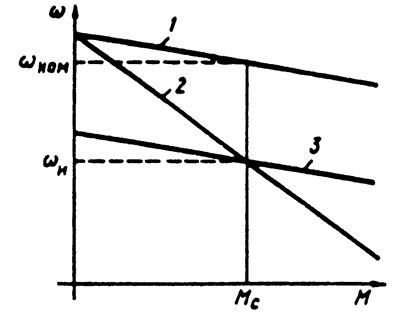
Рис. 2. Естественная и искусственные механические характеристики электродвигателя с возбуждением от постоянных магнитов (с независимым электромагнитным возбуждением): ωном — номинальное значение угловой скорости вала
Стабильность угловой скорости ω, характеризуемая степенью ее изменения при возможных колебаниях момента нагрузки на валу электродвигателя, определяется жесткостью его механической характеристики. Чем больше жесткость характеристики, тем стабильнее величина ω. На рис. 2 большая стабильность угловой скорости обеспечивается при искусственной механической характеристике (прямая 3).
В зависимости от способа воздействия на электродвигатель и вида получаемых искусственных характеристик угловая скорость вала может увеличиваться или уменьшаться в сравнении с работой по естественной характеристике. Увеличение величины ω в электродвигателях с электромагнитным возбуждением может быть обеспечено за счет уменьшения магнитного потока.
При изменении направления действия вращающего момента электродвигателя, например, вследствие изменения направления протекания тока в его обмотках, и сохранении неизменным направления вращения вала якоря электродвигатель переходит на генераторный режим работы. Генераторный режим работы электродвигателя возможен или при замедлении (торможении), когда движение вала в том же направлении поддерживается за счет накопленной ранее кинетической энергии, или при движении за счет каких либо внешних сил, приложенных к ЭП.
Двигательный режим характеризуется тем, что вращение вала электродвигателя в ЭП происходит в направлении действия его вращающего момента. При реверсировании электродвигателя одновременно изменяются и направление действия вращающего момента и направление вращения вала. При этом мощность электродвигателя положительна, следовательно имеет место двигательный режим.
Электродвигатель проектируется таким образом, чтобы, работая на естественной характеристике с номинальными частотой вращения вала, силой тока, вращающим моментом и мощностью, он не нагревался выше определенной температуры, на которую рассчитана его изоляция.
При регулировании частоты вращения вала электродвигатель в ЭП работает на искусственных характеристиках, т.е. в условиях отличных от указанных в паспорте. Поэтому для сохранения нормативного срока службы нагрузка электродвигателя должна быть такой, при которой в нем протекает ток, сила которого не выше номинального значения. Такая нагрузка называется допустимой: для одной группы двигателей она равна номинальному моменту, а для другой — номинальной мощности электродвигателя. Следует отметить, что степень нагрева электродвигателя при номинальном значении силы тока определяется не только нагрузкой по моменту и мощности, но условиями его охлаждения (наличием вентиляции).
Для выбора наиболее рационального вида регулируемого ЭП используются различные технико-экономические показатели: капитальные затраты на изготовление, эксплуатационные расходы, срок окупаемости, надежность, удобство и простота в эксплуатации, серийность и унификация средств управления и т.д. В результате анализа всех возможных вариантов выявляется экономически обоснованное решение.