
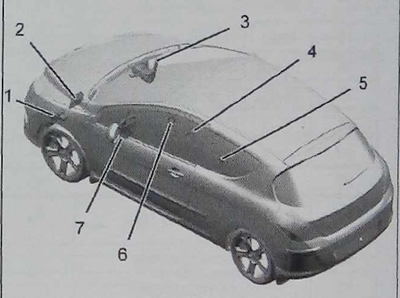
Locația CAN IS ECU
Rețeaua CAN IS conectează unități de control legate de mișcarea vehiculului, precum sistemul de frânare!, cutia de viteze sau motorul.
Rata de transfer de date 500 Kbps (High Speed).
Rețeaua CAN IS este o rețea de mai multe blocuri, unde fiecare dintre ele transmite în mod constant informații pentru toate celelalte blocuri.
Fiecare ECU procesează propriile informații.
Transmiterea mesajelor prin rețea are loc periodic, cu excepția mesajelor care sunt de natură aleatorie. Rețeaua CAN IS are un dispozitiv care permite comunicarea atunci când în ea sunt incluse cel puțin două unități de control.
ECU de control al motorului (1320) și unitatea de comutare (BSI 1) sunt singurele computere care au rezistență finală.
Pentru a permite comunicarea în rețea, ECU de control al motorului (1320) și unitatea de comutare (BSI 1) ar trebui să fie întotdeauna online.
Caracteristici ale rețelei CAN IS:
- unele unități de control sunt conectate într-o linie care este activată printr-o comandă de la o telecomandă (RDC), care permite preliminar «a trezi» unitati de control;
- linia de diagnostic K.
Notă. O întrerupere a firului CAN High sau CAN Low face imposibilă comunicarea în rețea.
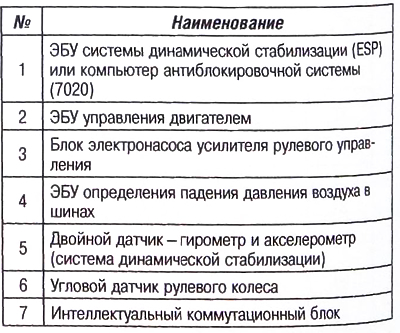
Denumiri:
- «H» — Rețea CAN în modul standby;
- «J» — Rețea CAN în regim de funcționare;
- «V» - volt;
- «T» - timp.
Rețeaua de interconectare CAN este caracterizată de două tensiuni medii de funcționare:
- Can High - 2,65 V;
- CAN scăzut - 2,35 V.
Rețeaua CAN este operațională la CAN IS High + CAN IS Low = 5V.
Notă. Valorile tensiunii afișate sunt valori medii.
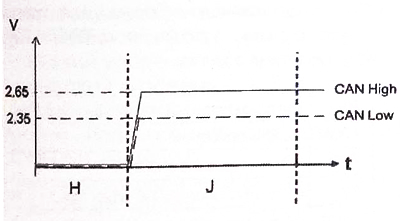
Curbe nominale pentru rețeaua CAN (citirile osciloscopului)
 | 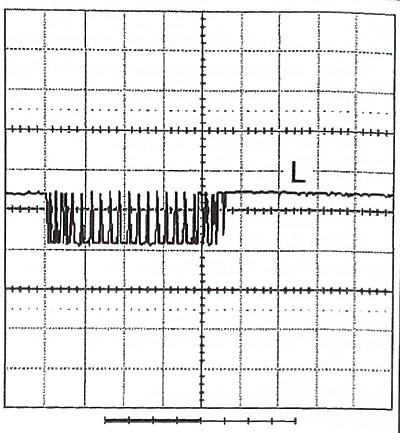 |
- «LA»: CAN High;
- «L»: CAN IS Low.
Tensiune: 1 V.
Timp: 100 m/s.
Condiții de test:
- motorul nu funcționează;
- contactul este pus.
Rezultate: observați o componentă DC de aproximativ 2,5 volți și o serie de impulsuri alternante cu o amplitudine de 1 V, reprezentând informații transmise prin rețeaua CAN.
Semnalul CAN Low este inversat față de semnalul CAN High.