
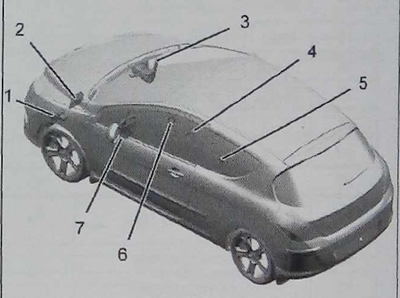
Розташування ЕБУ мережі CAN IS
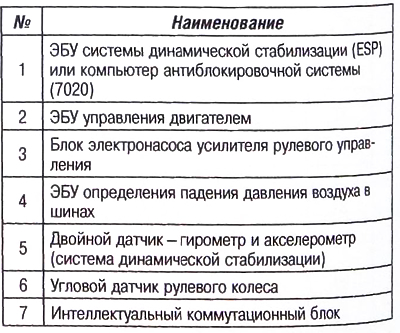
Мережа CAN IS з'єднує блоки керування, пов'язані з рухом автомобіля, наприклад, гальмівної системи!, коробки або двигуна.
Швидкість передачі 500 Кбіт/сек (High Speed).
Мережа CAN IS є мережею багатьох блоків, де кожен із них постійно передає інформацію для всіх інших блоків.
Кожен ЕБУ опрацьовує свою інформацію.
Передача повідомлень через мережу відбувається періодично, крім повідомлень, що мають випадковий характер. Мережа CAN IS має пристрій, що дозволяє встановлювати зв'язок при включенні до неї принаймні двох блоків управління.
ЕБУ управління двигуном (1320) та комутаційним блоком (BSI 1) є єдиними комп'ютерами, що мають кінцевий опір.
Щоб забезпечити зв'язок по мережі, ЕБУ керування двигуном (1320) та комутаційний блок (BSI 1) повинні завжди бути в мережі.
Особливості мережі CAN IS:
- деякі блоки управління з'єднані в лінію, що активізується за командою з дистанційного пульта (RDC), що дозволяє попередньо «розбудити» блоки керування;
- лінія діагностики До.
Примітка. Розрив дроту CAN High або CAN Low унеможливлює комунікацію в мережі.
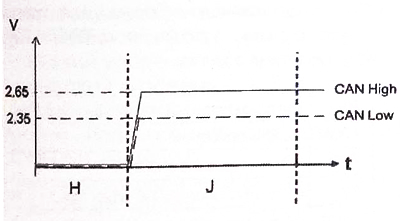
Позначення:
- «Н» - Мережа CAN у черговому режимі;
- «J» - Мережа CAN у робочому режимі;
- «V» - вольт;
- «Т» - Час.
Міжсистемна мережа CAN характеризується двома середніми значеннями напруги в робочому режимі:
- Can High — 2,65 В;
- CAN Low — 2,35 В.
Мережа CAN перебуває у робочому режимі при CAN IS High + CAN IS Low = 5B.
Примітка. Подані значення напруги є середніми значеннями.
Номінальні криві мережі CAN (покази осцилографа)
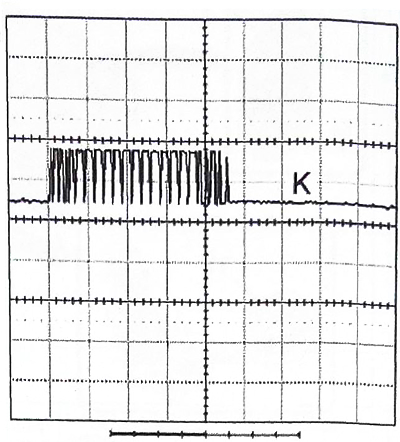 | 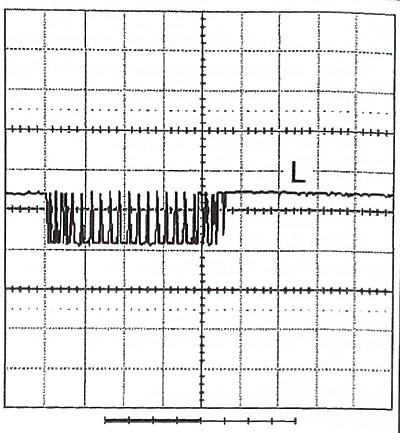 |
- «К»: CAN High;
- «L»: CAN IS Low.
Напруга: 1 Ст.
Час: 100 м/с.
Умови проведення тестів:
- двигун не працює;
- запалення увімкнено.
Результати: спостерігати постійну складову на рівні приблизно 2,5 вольт і серію змінних імпульсів з амплітудою 1 В, що представляють інформацію, що передається мережею CAN.
Сигнал CAN Low має зворотну спрямованість у порівнянні із сигналом CAN High.